Регулируемый электропривод
В период интенсивного перехода к индивидуальному электроприводу, который в России практически завершился к 1934 г., во всех новых производствах появилось большое количество различных типов электроприводов.
Если в нерегулируемом электроприводе малой и средней мощности прочно заняли свое место и не уступили его до настоящего времени асинхронные двигатели с короткозамкнутым ротором, а в мощных электроприводах - синхронные двигатели, то регулируемые электроприводы были весьма разнообразны. Это было связано с ограниченными техническими возможностями средств управления, вследствие чего приходилось искать способы управления в свойствах собственно электродвигателей. Так, широко использовались двигатели постоянного тока с различными схемами возбуждения (независимой, параллельной, последовательной, смешанной) при реостатном регулировании или при ослаблении магнитного поля, асинхронные двигатели с фазным ротором, коллекторные двигатели переменного тока, двигатели Бушеро и т. п.
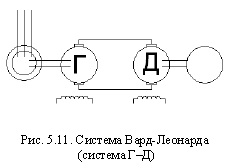
Наибольшее применение в лируемых электроприводах средней и большой мощности в этот период и в дальнейшем нашла предложенная еще в конце XIX в. система Гарри Вард- Леонарда (генератор - двигатель), состоявшая из нескольких электрических машин (рис. 5.11), но обладавшая отличными регулировочными возможностями как в статике, так и в динамике. На основе этой системы удалось создать электропривод реверсивных прокатных станов. Первой такой установкой в СССР был электропривод блюминга мощностью 7000 л. с., выпущенный заводом «Электросила» в 1931 г. Для питания двигателя был установлен трехмашинный агрегат, состоявший из асинхронного двигателя мощностью 3680 кВт и двух генераторов постоянного тока мощностью по 3000 кВт. Система управления, разработанная ХЭМЗ, решала задачи автоматического управления магнитным полем генераторов и двигателей, моментом асинхронных двигателей и т. п.