РЕГУЛИРОВАНИЕ СИСТЕМЫ УПРАВЛЕНИЯ ВЕРТОЛЕТОМ
Регулирование системы управления вертолетом производится в целях обеспечения его нормальной управляемости в различных условиях полета и включает в себя регулирование управления несущим винтом, стабилизатором, рулевым винтом и объединенным управлением системы «шаг — газ».
Регулирование объединенным управлением системы «шаг — газ» описано в главе «Несущие винты», а регулирование рулевым винтом в главе «Рулевые винты».
Регулирование управления несущим винтом
Перед тем как непосредственно приступить к проверке или регулировке управления несущим винтом, вертолет нужно установить на домкраты.
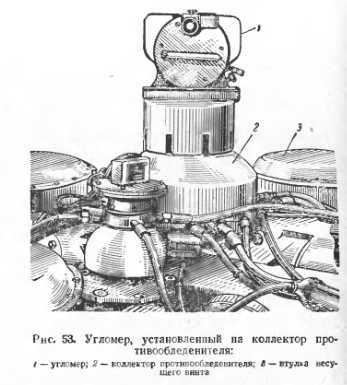
При помощи домкратов и угломера, устанавливаемого на втулку несущего винта или на вал гласного редуктора, ось винта, или, другими словами, вал главного редуктора, на котором крепится втулка несущего винта, устанавливается в вертикальное положение.
Угломер (рис. 53) имеет два уровня, расположенные в горизонтальной плоскости под углом 90°, и подвижный диск с делениями, по которым ведется отсчет градусов и минут.
Чтобы установить ось несущего винта вертикально, вначале домкратами добиваются такого ее положения, при котором пузырек одного из двух уровней угломера расположится посередине между метками. После этого добиваются, чтобы пузырек другого уровня угломера также установился между метками. В этом случае ось винта займет вертикальное положение. При выполнении указанных работ следует учитывать, как изменится положение оси при поднятии или опускании вертолета определенным домкратом. Часто бывает так, что, добиваясь нужного расположения оси в одной из плоскостей (продольной или поперечной), нарушают регулировку в другой плоскости, вследствие чего затрачивается много времени на установку оси винта в вертикальное положение.
Для вертолетов, которые вывешиваются при помощи четырех домкратов, можно рекомендовать при установке оси несущего винта в вертикальное положение пользоваться одновременно двумя домкратами: либо передними, либо задними, либо боковыми, расположенными с одной стороны вертолета. При таком действии домкратами положение оси винта изменяется в одной плоскости без нарушения регулировки в другой.
После установки оси несущего винта в вертикальное положение приступают к выполнению регулировочных работ по системе управления.
Регулирование управления общим шагом
Смысл регулирования управления общим шагом несущего винта заключается в обеспечении требуемого хода ползуна автомата перекоса в зависимости от положения и движения рычага «шаг—газ».
Рычаг «шаг — газ» и ползун автомата перекоса при помощи регулируемой тяги устанавливаются в крайнее нижнее положение, причем между ползуном и нижним упором должен быть зазор 1—2 мм. Затем рычаг «шаг — газ» поднимается в крайнее верхнее положение, при этом ползун перемешается вверх на определенное расстояние, которое замеряется. Это расстояние должно быть в пределах, установленных инструкцией по эксплуатации для данного типа вертолета. Убедившись в правильной регулировке управления общим шагом, проверяют по перемещениям ползуна автомата перекоса от нижнего крайнего положения до верхнего крайнего положения показания указателя общего шага.
Указатель показывает в условных величинах режим работы несущего винта в соответствии с характеристикой системы «шаг — газ».
Следует сказать, что на правильность показаний указателя в процессе эксплуатации нужно обращать серьезное внимание, так как показания указателя, не соответствующие характеристике системы «шаг — газ», могут послужить причиной летного происшествия. Это связано с тем, что наибольшую тягу несущий винт развивает при работе двигателя на максимальном (взлетном) режиме и определенном угле установки лопастей для каждого типа вертолета.
Указатель на большинстве вертолетов регулируется таким образом, что при наибольшей тяге несущего винта он показывает 9°. Если же указатель будет показывать 9°, а на самом деле угол установки лопастей не будет соответствовать этой величине, то тяга несущего винта будет меньше максимально возможной. Это опасно в тех случаях, когда производится посадка на ограниченную площадку или когда в сложных условиях полета необходимо получить максимальную тягу несущего винта. Летчик в этих случаях устанавливает рычаг «шаг — газ» в положение, при котором на указателе будет 9°, т. е. на максимальную тягу несущего виита. На самом же деле тяга не будет максимальной, что приведет в лучшем случае к резкому снижению вертолета и к грубой посадке. Поэтому следует периодически проверять правильность показаний указателя общего шага несущего винта.
Регулирование продольно-поперечного управления
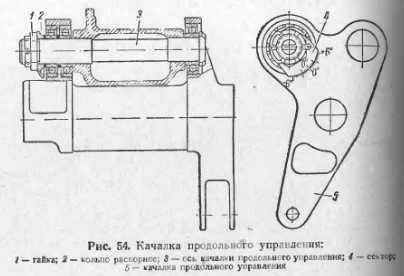
Регулирование продольно-поперечного управления на вертолетах осуществляется регулируемыми тягами, которые Устанавливаются в цепях управления. Изменяя длину тяг, Добиваются необходимого отклонения тарелки автомата перекоса. Углы отклонения тарелки автомата перекоса определяются, как правило, при помощи угломера. Этот способ замера углов наиболее распространен и пригоден для всех типов вертолетов. В последнее время для замера углов тарелки автомата перекоса на некоторых типах вертолетов применяется другой, более простой и удобный способ, заключающийся в том, что на качалки продольного и поперечного управления (рис. 54) наносятся установочные шкалы, по которым и производят отсчет углов наклона тарелки автомата относительно оси вала главного редуктора. Цена каждого деления установочных шкал на качалках соответствует отклонению тарелки автомата на 1°. Нониуоные шкалы на секторах и установочные шкалы на качалках дают возможность установить тарелку автомата перекоса с точностью до 10.
Регулирование продольно-поперечного управления при помощи угломера производится следующим образом.
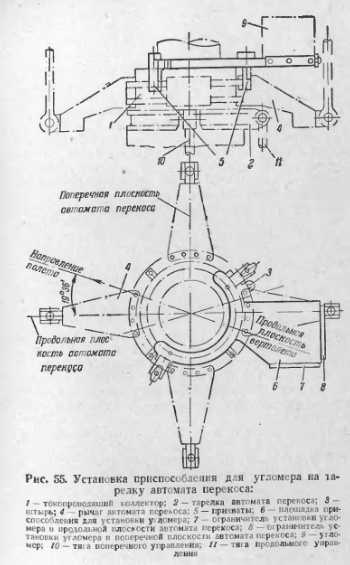
На тарелке автомата перекоса (рис. 55) закрепляется специальное приспособление, представляющее собой площадку, на которой устанавливается угломер. Ручку управления ставят при помощи отвеса в нейтральное положение. При этом кольцо автомата перекоса должно либо не иметь отклонений, либо иметь небольшой наклон в продольной и поперечной плоскостях, что определяется инструкцией по эксплуатации для каждого типа вертолета. Установка кольца автомата перекоса в указанное положение производится регулируемыми тягами продольного и поперечного управления.
Если в цепи продольного и поперечного управления вертолета установлены гидроусилители и загрузочные механизмы, то штоки гидроусилителей при помощи регулируемых тяг устанавливаются в нейтральное положение, а тяги загрузочных механизмов присоединяются к ручке управления без усилия. Последнее положение справедливо не для всех вертолетов даже одного и того же типа. Положение ручки, при котором к ней подсоединяются загрузочные механизмы, определяется моментом, создающимся на лопастях несущего винта. Момент зависит от профиля лопасти. Так, например, на вертолетах Ми-4 применяются комплекты лопастей несущего винта с двумя профилями. При установке одних комплектов загрузочные механизмы присоединяются без усилия к ручке управления, когда она находится в нейтральном положении. А при установке других комплектов лопастей несущего винта, создающих кабрирующий момент, загрузочные механизмы подсоединяются 1 ручке без усилия тогда, когда ручка управления несколько наклонена вперед.
Замер углов отклонения тарелки автомата перекоса производится при отклонении ручки управления вперед — назад и влево — вправо с достаточно большой точностью (до нескольких минут). Упоры ручки регулируются таким образом, чтобы во всех четырех крайних положениях ручки углы отклонения тарелки автомата перекоса соответствовали необходимым.
Указанная точность в регулировке отклонения тарелки автомата перекоса диктуется условиями обеспечения нормальной управляемости вертолета, у которого при большой силе тяги несущего винта даже незначительное ее отклонение создает большой момент. Так, на вертолете Ми-4 при полете его с нормальным полетным весом отклонение автомата перекоса на 1° создает момент 450 кгм.
Если в процессе эксплуатации допускаются нарушения в регулировке отклонения тарелки автомата перекоса, когда она отклоняется на меньшие величины (не только градусов, но и минут), то это приводит к уменьшению запасов управляемости на вертолете и может явиться причиной летных происшествий.
После регулирования ручного управления проверяются зазоры между рычагами вращающегося кольца автомата перекоса и качалками продольного (поперечного) управления и рычагом общего шага. Проверка производится для того, чтобы избежать касания деталей друг о друга при вращении несущего винта. Касание деталей друг о друга может быть в отдельных случаях при четырех крайних отклонениях ручки управления вперед и вправо (влево) до отказа, а также назад и вправо (влево) до отказа.
Для увеличения зазоров в случае необходимости можно в пределах допуска произвести перерегулировку кольца автомата перекоса. Особенно тщательно нужно проверять зазоры на модифицированных автоматах перекоса или новой их конструкции.
После окончательной регулировки ручного управления и механизмов загрузки (триммеров) проверяются показания указателей нажатием тумблера управления триммерами влево, а затем вправо. При этом соответственно влево и вправо должны отклоняться ручка управления и стрелка указателя. Таким же образом проверяются показания указателя при нажатии тумблера вперед и назад. Во время проверки нужно обращать внимание на то, чтобы при среднем положении штока загрузочного механизма стрелка указателя совпадала с риской «О». При полном перемещении штока загрузочного механизма от среднего положения на выпуск и уборку стрелка указателя при отклонении вправо и влево должна совпадать с крайними рисками. Допускается небольшое (1—2 мм) несовпадение конца стрелки с рисками при условии равенства несовпадений с правой и с левой сторон.
Регулирование управления стабилизатором
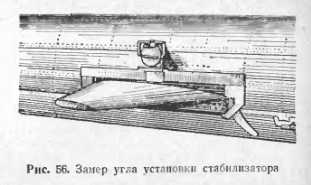
Регулирование управления стабилизатором заключается в определении углов его отклонения в зависимости от положения рычага «шаг — газ» (так как управление стабилизатором связано с этим рычагом). Обычно эти углы определяются при двух положениях рычага: крайнем нижнем и крайнем верхнем. Регулирование осуществляется изменением длины регулируемого звена в цепи управления стабилизатором. Замер углов отклонения производится либо при помощи специального приспособления (рис. 56), либо определением превышения хвостика стабилизатора над носиком.
В процессе эксплуатации разрегулирование управления стабилизатором бывает крайне редко. Поэтому углы отклонения стабилизатора замеряются, как правило, только при его замене.
