Контроль и исправление пути
При выполнении полета вследствие изменчивости ветра, неточного выдерживания заданного режима полета, погрешностей навигационного оборудования, ошибок в навигационных измерениях и расчетах, ВС может уклониться от ЛЗП, выйти за предел ширины трассы и не прибыть на контрольные ориентиры в назначенное время Поэтому для обеспечения точного следования по трассе и вывода ВС в пункт назначения в заданное время экипаж в процессе полета ведет непрерывный контроль пути необходимые исправления в навигационный режим полета Ориентировка, контроль пути, взаимосвязанные между собой, и являются единым процессом самолетовождения
Контроль пути состоит в проверке соответствия фактической линии пути заданному маршруту и времени прохода контрольных ориентиров в заданное время Различают контроль пути по направлению, по дальности и полный контроль пути
Контроль и исправление пути по направлению Контроль на каждом участке маршрута начинается с проверки правильности взятого направления полета путем сравнения фактического путевого угла с заданным В зависимости от аэронавигационной обстановки полета и состава навигационного оборудования ВС контроль пути по направлению выполняется различными способами и средствами Но независимо от способа и средств в процессе контроля определяются ФПУ и линейно-боковое уклонение ЛБУ. Контроль пути по направлению осуществляется прежде всего не автоматическим или автоматическим счислением пути. Не автоматическое счисление пути сводится к выдерживанию курса, обеспечивающего равенство ФПУ=К+УС=ЗПУ. При автоматическом счислении контроль пути осуществляется постоянным выдерживанием 2=0. Причем контроль пути в процессе полета должен быть непрерывным Такой контроль обеспечивается также при полетах с использованием РНТ, расположенных на ЛЗП. При полете на РНТ контроль нахождения ВС на ЛЗП. Если это условие выполняется, то вектор путевой скорости постоянно направлен по ЛЗП (полет выполняется путевым способом), и наиболее вероятное место ВС находится на ЛЗП, т с. z = 0
При нахождении в районе полетов маяков РСБН, ВОР ДМЕ, наземного ОРЛ или радиолокационного ориентн ра, расположенных в стороне от ЛЗП, периодический контроль пути осуществляется аналитическим преобразованием измеренных полярных координат пеленга самолета и дальности в прямоугольные г и s Контроль пути по направлению осуществляется также периодическим запро сом места или пеленга ВС у диспетчера службы УВД При обнаружении уклонения ВС от ЛЗП экипаж выполняет исправление пути. Поскольку та кие средства самолетовождения, как курсовые приборы радиокомпасы бортовые радиолокаторы и радиопеленгаторы, обеспечивают контроль пути с ошибкой ±2°, то исправление ПУТИ по направлению выполняется только в том случае, если боковое уклонение ВС от ЛЗП превышает точность используемых средств для контроля пути Исправление ПУТИ НО па правлению выполняется вводом по правки в курс (ПК) для выхода на КО, находящийся на ЛЗП; пересчетом курса для следования по новой ЛЗП; коррекцией счисленной координаты при полете с использованием АПК
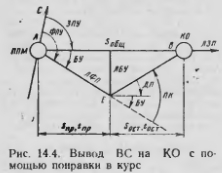
Исправление пути по направлению внесением поправки в курс (ПК) выполняется для вывода ВС на ЛЗП (на КО или очередной ППМ), для чего в расчетный курс полета КР вносится поправка ПК, так как в момент исправления пути берется курс
Боковое уклонение отсчитывают от ЛЗП к ЛФП вправо со знаком плюс, влево со знаком мннус. Дополнительную поправку берут с тем же знаком, что и БУ. Знак поправки ПК берется противоположным знаку бокового уклонения.
Расчеты показывают, что данный способ исправления пути приемлем при значениях ПК, не превышающих 30°. В тех случаях, когда поправка в курс превышает 30° и оставшееся расстояние до очередного ППМ достаточно велико, исправление пути выполняется пересчетом курса следования. Для этого необходимо нанести на карту МС, проложить новый маршрут до ПМ, к которому необходимо вывести ВС, измерить путевой угол (новый ЗПУ) и для него по ветру, определенному в полете, рассчитать новый курс следования.
При полетах на ВС. оборудованных АПК. исправление пут» по направлению осуществляется при коррекции счисленной координаты, выдерживаемой равной нулю. В процессе коррекции с использованием радиотехнических средств определяется фактическое значение координаты z. которое затем автоматически или вручную устанавливается на счетчике коордниат, после чего ВС выходит на ЛЗП (гф=0).
Контроль и исправление пути по дальности. Для выполнения полета по расписанию ведется контроль пути по дальности, который заключается в определении рубежа, которого достигло ВС к текущему моменту времени. Экипаж определяет фактически пройденное Sup или оставшееся S„cт до контрольного ориентира или поворотного пункта маршрута расстояние. Контроль пути выполняется различными способами и средствами, обеспечивающими измерение пройденного или оставшегося расстояния. Непрерывный контроль мути по дальности выполняется неавтоматическим или автоматическим счислением пути.
Коктроль пути неавтоматическим счислением практически сводится к выдерживанию скорости полета, обеспечивающей выполнение временной программы полета, рассчитанной по прогностическому ветру. При автоматическом счислении пути контроль ведется по показаниям счетчиков координат.
При использовании радиодально-мерных систем (или дальномерного канала УДС), расположенных на ЛЗП, контроль пути по дальности упрощается. В этом случае непрерывно или дискретно определяется оставшееся или пройденное расстояние в зависимости от расположения РНТ. Этот способ применим и тля БРЛС, с помощью которого измеряется дальность до радиолокационного ориентира, расположенного на ЛЗП.
Контроль пути по Дальности с использованием боковых (угломерных каналов РНС) осуществляется прокладкой линии положения или выходом на предвычислениый пеленг. Прокладка линии положения от боковой РПС может быть выполнена в любой необходимый момент времени, однако данный способ контроля ие оперативен и вызывает дополнительные погрешности при графической работе на карте.
Контроль пути по предвычисленному пеленгу — наиболее простой. Расчет предвычисленного пеленга выполняется в намеченных точках контроля в процессе подготовки к полету. В момент ПНзм=Ппргда ВС будет находиться на расчетном КО (при полете по ЛЗП). При выполнении контроля пути с использованием бокового радиомаяка УДС или бокового радиолокационного ориентира измеренные полярные координаты пеленга и дальности самолета преобразуются в прямоугольные г и s. При обнаружении неточного прибытия ВС в заданный пункт экипаж производит исправление пути но дальности. Для этого можно изменить скорость полета, с разрешения диспетчера УВД сменить эшелон полета с учетом распределения ветра по высотам или выполнить полет по спрямленному маршруту (по согласованию с диспетчером). Расчет изменения скорости выполняется в следующем порядке:
Полный контроль пути состоит в определении места ВС, что позволяет судить о точности выдерживания линии заданного пути ВС и о его ноложении но дальности. Определение места ВС осуществляется: счисленисм пути (автоматическое или неавтоматическое); обзорно-сравнительным способом; способом координатных преобразований, пролетом над навигационным ориентиром.
Высокая надежность контроля пути только комплексным использованием технических средств самолетовождения. В условиях непрерывного радиолокационного контроля с Земли ВС должны иметь, как минимум, два независимых канала определения МС, а при его отсутствии — не менее трех независимых каналов контроля пути.
Воздушная навигация: справочник/А.М. Белкин. М.: Транспорт. 1988г.
